
DIY DRONES


Budowa Drona
Pierwszy etap #1
Ja niestety drona mam już złożonego a nie widzi mi sie żeby rozkładać go na nowo i na nowo składać. Tak więc będe opierał sie na zdjęciach i relacjach z internetu.Na samym początku oczywiście musimy poskładać ramę do kupy. To jaka to będzie rama zależy tylko od ciebie. Ceny ram są bardzo rozbierzne od 50 zł do nawet 1500 zł ze składanym spodem itp. w moim przypadku jest to rama X525, która kosztuje w granicach 150 zł. Ja kupiłem tą rame za 80 zł na Aliexpress:
Drugi etap #2 - mocowanie ESC,regulacja ESC i mocowanie APM
Oczywiście drugim etapem jest złożenie APM i regulatorów ESC. Sam montaż kontrolera nie będzie problemem. Do tego polecam płytkę antywibracyjną, na którą zamocujemy APM:
Regulatory ESC musimy odpowiednio przygotować do zamocowania. Istnieją dwie metody na to:
- Lutowanie przewodów gdzie przewody z silnika lutujemy do ESC, metoda jest dobra bo mamy pewność, że nie odepnie nam sie
przewód w czasie lotu, lecz minus tej metody to że w razie wymiany silnika albo ESC musimy przewody odlutować
- Lutowanie gniazd bananowych, gdzie lutujemy je do przewodów i do ESC, dzięki czemu możemy w przyszłości szybko wymienić
silnik albo esc bez konieczności lutowania.
W sumie nie ma znaczenia jak przewody z silników przylutujemy do ESC, ważne żeby środkowy przewód był przylutowany do
środkowego gniazda w regulatorze. To jak przylutujemy przewody zewnętrzne ma znaczenie co do kierunku obrotów silnika, w
razie konieczności przewody możemy zamienić miejscami, zmieniając polazyzację
Ja zastosowałem metodę lutowania, gdzie połączyłem 3 przewody silnika z regulatorem ESC:



Bezpieczeństwo !!!!
Pamiętaj, że po złożeniu wszystkiego do kupy, nie zakładajmy śmigieł !!!. Silniki stosowane w dronach są bardzo szybkie a elektronika zawodna, więc nie będzie problemu z uszkodzeniem skóry albo palców. NIGDY NIE RÓB NICZEGO PRZY DRONIE ZE ŚMIGŁAMI!!!.
Co będzie potrzebne:
W zależności jakiego drona będziemy budować, musimy posiadać: - Rama w zależności 4,6 albo 8 - Płytka antywibracyjna APM (Opcjonalnie) - 4 Silniki bezszczotkowe CCW i CW - 4 śmigła 1045 CW i CCW - 4 Regulatory ESC Simonk30A - APM 2.6 + GPS Ublox - Aparatura FlySky FS-T6 - Telemetria 433 Mhz (Opcjonalnie) - Power Module (Opcjonalnie) - Lutownicy i troche przewodów - Przedłużacze serw - Dużo cierpliwości - Drobne elementy jak wtyki bananowe,kalafonia , cyna koszuli termokurczliwe itp.

A tutaj metoda na wtyki bananowe:
Teraz zostaje nam przymocować ESC do ramion koło silnika. Ale jeszcze zanim to zrobimy, musimy do regulatorów doprowadzić prąd. Wszytskie 4
regulatory
podłaczamy równolegle a na końcu zakończamy go wtykiem XT60, do podłaczenia pakietu Li-po. Po podłączeniu regle powinny zagrać melodyjkę.
Dzwięki
te to gotowość do pracy. Ale również te dzwięki to wstępne programowanie ich. Jak jesteśmy przy programowaniu to kilka słów. Przed wszytskim
musimy
zaprogramować odpowiednio wszytskie regulatory. Możemy to zrobić w bardzo prosty sposób. Wyciągamy aparaturę i nadajnik, teraz do kanału nr. 3
nadajnika wpinamy przewód z regulatora (Nie podłączamy jeszcze napięcia do ESC). Włączamy aparaturę i dzwignię gazu dajemy maksymalnie w górę.
Teraz podłaczamy lipo do regulatora i usłyszymy pojedynczy dzwięk, wtedy dzwignię gazu dajemy maksymalnie w dół. Wtedy regiel powinien zagrać
dwa dzwięki po czym melodyjkę, oznacza to zaprogramowanie ESC. Tak robimy ze wszystkimi ESC i mamy sprawę załatwioną. Dzięki temu ESC
rozpoznaje
maksymalne wychylenie drążka gazu (PWM).
Teraz tak jak widzicie na zdjęciach, ja regulator przymocowałem za pomocą koszulki termokurczliwej, ale taki regulator możemy zamocować za pomocą
plastikowej opaski zaciskowej tzw. trytytki. Tutaj jest akurat wszytsko jedno, w jednej i drugiej metodzie regulator nam nie odpadnie. W sumie część
drugą
mamy za sobą więc możemy przejśc do następnego etapu.
Trzeci etap #3 - podłaczanie ESC do APM i podłaczanie nadajnika i GPS
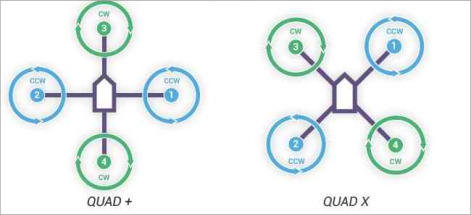
Tutaj już nam zaczyna sie troche pod górkę. Ale każdą można pokonać bez większych problemów. I tak, wszytskie ESC musimy wpiąć w kanały Outputs. Problem w tym że nie możemy ich wpiąć “na pałe”. APM musi wiedzieć który silnik w którym miejscu . Na to jest metoda bo mamy schematy w internecie. Schemat dla APM wygląda tak :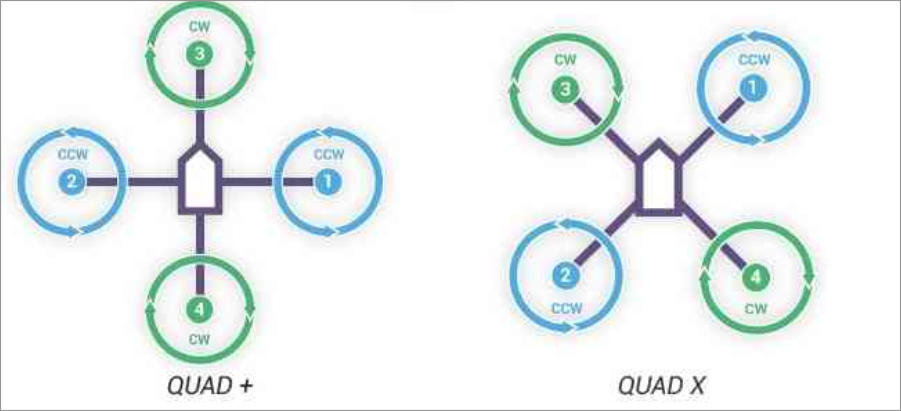
My skupiamy sie na obrazku po prawej stronie, ale jak już jesteśmy już przy tym temacie to w świecie dronów istnieje kilka ram w równym układzie. My
najbardziej skupiamy sie na Quad X ponieważ ten układ jest najbardziej popularny, pewnie ze względu na to, że gdy przymocujemy kamerę do spodu
drona,nie będziemy mieli ramiona i silnika w kadrze tak jak w układzie “Plusa” bądz “Krzyża”. Wiec ze schematu wynika, że silnik w górnej prawej częsci
podłączamy do gniazda Outputs 1, silnik w dolnej lewej częsci do gniazda Outputs 2, silnik w górnej lewej części do gniazda 3 i w prawej dolnej częsci
do gniazda nr 4. Takie podłączenie zapewni że arducopter będzie indywidulanie kontrolował każdy silnik co przełoży sie na to, że nasz Quad będzie
latał.
Teraz kiedy regulatory mamy podpięte, przechodzimy do podłaczenia nadajnika do Arducoptera. Tutaj mamy już z górki bo akurat przewody z
nadajnika
podłączamy 1-1 do arducoptera. Czyli po koleju kanał 1 w nadajniku podłaczamy do kanału 1 w arducoptrze, kanał drugi do drugiego itp.
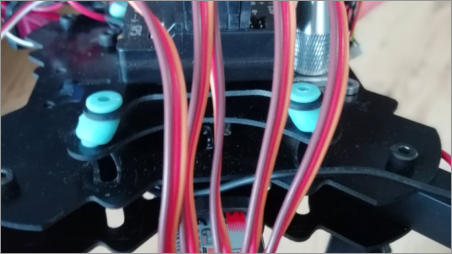
U mnie wygląda to następująco:
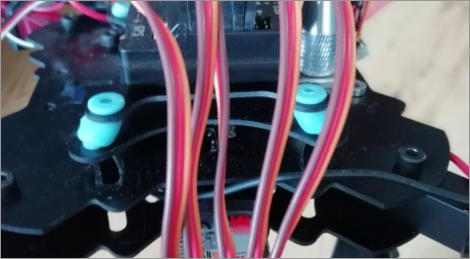
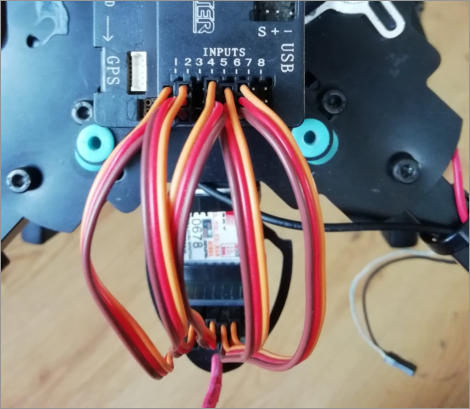
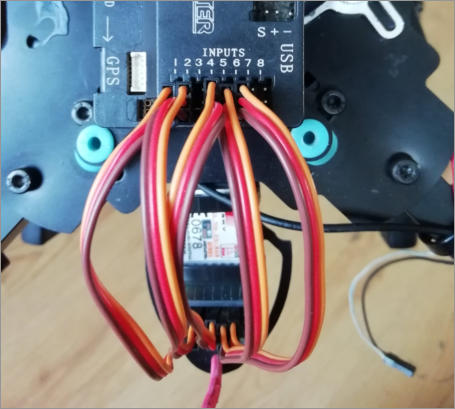
A tutaj widok z góry, gdzie widać połaczenie do arducoptera:
Jak możecie zobaczyć, kanał 3 w nadajniku mam wolny. Jest to spowodowane tym, że jestem w trackie regulacji ESC i chwilowo kanał 3 pozostawiłem
wolny. No i tutaj możemy już zakończyć najtrudniejszą część. Teraz przejdzmy do podłaczenia anteny GPS. Tutaj również zalecam antenę zawiesić troche
ponad APM, ponieważ cała elektronika w APM może mieć wpływ na GPS. Antena to koszt ok 20-30 zł na Allegro, wieć myślę że inwestycja się opłaci.

Podłączenie anteny jest banalnie proste. Z końcówki anteny wystają dwa przewody (Przeważnie, jezeli antena jest wyposażona również w kompas), więc
nie mamy możliwości podłączenia jej innaczej. Jeden przewód podłaczamy do gniazda GPS a drugi do szyny I2C.
Przewód 5-cio żyłowy to modół GPS a 2-wu żyłowy to kompas

Musimy jeszcze odpowiednio ustawić kompas zgodnie z przodem modelu,w tym pomaga strzałka na antenie, a dla pewności że kierunek jest ok,
możemy antenę rozebrać, odszukać mały czarny czip, i znaleść na niej oznaczenia zaczynający sie na literkę L albo A. Literki te wyznaczają kierunek.

Czwarty etap #4 - Podłaczanie napięcia do APM i podłaczenie Telemetri
Jesteśmy już prawie na samym końcu. Mam nadzieje że wytłumaczyłem wszytsko do tej pory zrozumiale (Bardzo sie stram). Tutaj mamy już wszytsko złożone do kupy, lecz brakuje nam jeszcze jednego, napięcia do APM i podłączenie samej telemetri. Zacznijmy od APM i jego napięcia. Tutaj mamy również dwie metody doprowadzenia napięcia do płytki APM. Jak już wspomniałem wcześniej pierwsza możliwość to Power Module, które podłaczamy do płytki i do pakietu lipo. Mamy tutaj dość dobrą metodę, bo gdy podłaczymy napięcie do płytki przez Power Module, to na “sztucznym horyzoncie” w programie Mission Plenner (O nim w innym temacie) będziemy mogli obserwować napięcie pakietu lipo i natężenie prądku generowane przez silniki wyrażone w amperach (A). Musimy to odpowiednio przygotować, ale to wszytsko w zakładce “Konfiguracja APM”. Druga metoda to doprowadzenie napięcia po przez ESC, wtedy nie wiemy jakim napięciem dysponuje nasz pakiet, ani też nie możemy ustawić tzw. FailSave, który ochroni nasz pakiet, przed totalnym rozładowaniem. Działa to tak, że ustawiamy próg napięcia np. 10,5 V przy pakiecie 3S, po przeamaniu tego progu, APM wywołuje np RTL albo Landa czyli albo powrót w miejsce startu, albo ląduje tam gdzie sie znajduje. Opcja bardz oprzydatna. Aby pominąć Power Module, wystarczy zewrzeć zworkę JPI, wtedy APM będzie zasilany z ESC, jeżeli zostawimy ją rozwartą to oznacza to że zasilamy ją z power module. Power module podłaczamy do APM pod gniazdo “PM”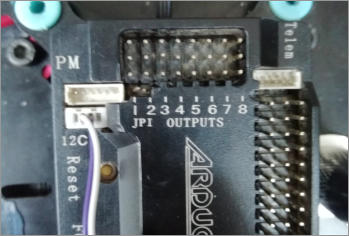
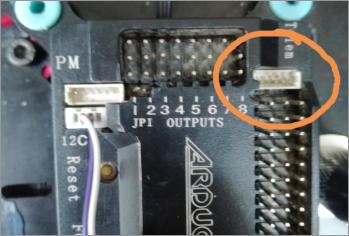
Tak więc napięcie w APM już mamy. Teraz podłączmy Telemetrie. Tutaj nie ma nic trudnego, po prostu znajdujemy miejsce dla zamontowania nadajnika
telemetrii,podłączamy do niego przewód a drugi koniec przewodu do gniazda “Telem”.
I tutaj możemy już zakończyć składanie naszego drona, ponieważ złożyliśmy już wszytsko. Teram musimy przejść do podstawowej konfiguracji w
programie Mission Plenner, i jeżeli wszytsko zostało podłączone właściwie, to całość konfiguracji powinno przejśc bez większych problemów.
Cały dron wygląda tak:

Uwaga
Masz jakieś pytania albo uwagi, co do treści strony ?
Proszę pisz e-mail klikając w odnośnik obok,będe bardzo wdzięczny za każde uwagi













DIY DRONES



Budowa Drona


Co będzie potrzebne:
W zależności jakiego drona będziemy budować, musimy posiadać: - Rama w zależności 4,6 albo 8 - Płytka antywibracyjna APM (Opcjonalnie) - 4 Silniki bezszczotkowe CCW i CW - 4 śmigła 1045 CW i CCW - 4 Regulatory ESC Simonk30A - APM 2.6 + GPS Ublox - Aparatura FlySky FS-T6 - Telemetria 433 Mhz (Opcjonalnie) - Power Module (Opcjonalnie) - Lutownicy i troche przewodów - Przedłużacze serw - Dużo cierpliwości - Drobne elementy jak wtyki bananowe,kalafonia , cyna koszuli termokurczliwe itp.

Pierwszy etap #1
Ja niestety drona mam już złożonego a nie widzi mi sie żeby rozkładać go na nowo i na nowo składać. Tak więc będe opierał sie na zdjęciach i relacjach z internetu.Na samym początku oczywiście musimy poskładać ramę do kupy. To jaka to będzie rama zależy tylko od ciebie. Ceny ram są bardzo rozbierzne od 50 zł do nawet 1500 zł ze składanym spodem itp. w moim przypadku jest to rama X525, która kosztuje w granicach 150 zł. Ja kupiłem tą rame za 80 zł na Aliexpress:
Drugi etap #2 - mocowanie ESC,regulacja ESC
i mocowanie APM
Oczywiście drugim etapem jest złożenie APM i regulatorów ESC. Sam montaż kontrolera nie będzie problemem. Do tego polecam płytkę antywibracyjną, na którą zamocujemy APM: Regulatory ESC musimy odpowiednio przygotować do zamocowania. Istnieją dwie metody na to: - Lutowanie przewodów gdzie przewody z silnika lutujemy do ESC, metoda jest dobra bo mamy pewność, że nie odepnie nam sie przewód w czasie lotu, lecz minus tej metody to że w razie wymiany silnika albo ESC musimy przewody odlutować - Lutowanie gniazd bananowych, gdzie lutujemy je do przewodów i do ESC, dzięki czemu możemy w przyszłości szybko wymienić silnik albo esc bez konieczności lutowania. W sumie nie ma znaczenia jak przewody z silników przylutujemy do ESC, ważne żeby środkowy przewód był przylutowany do środkowego gniazda w regulatorze. To jak przylutujemy przewody zewnętrzne ma znaczenie co do kierunku obrotów silnika, w razie konieczności przewody możemy zamienić miejscami, zmieniając polazyzację Ja zastosowałem metodę lutowania, gdzie połączyłem 3 przewody silnika z regulatorem ESC: Teraz zostaje nam przymocować ESC do ramion koło silnika. Ale jeszcze zanim to zrobimy, musimy do regulatorów doprowadzić prąd. Wszytskie 4 regulatory podłaczamy równolegle a na końcu zakończamy go wtykiem XT60, do podłaczenia pakietu Li-po. Po podłączeniu regle powinny zagrać melodyjkę. Dzwięki te to gotowość do pracy. Ale również te dzwięki to wstępne programowanie ich. Jak jesteśmy przy programowaniu to kilka słów. Przed wszytskim musimy zaprogramować odpowiednio wszytskie regulatory. Możemy to zrobić w bardzo prosty sposób. Wyciągamy aparaturę i nadajnik, teraz do kanału nr. 3 nadajnika wpinamy przewód z regulatora (Nie podłączamy jeszcze napięcia do ESC). Włączamy aparaturę i dzwignię gazu dajemy maksymalnie w górę. Teraz podłaczamy lipo do regulatora i usłyszymy pojedynczy dzwięk, wtedy dzwignię gazu dajemy maksymalnie w dół. Wtedy regiel powinien zagrać dwa dzwięki po czym melodyjkę, oznacza to zaprogramowanie ESC. Tak robimy ze wszystkimi ESC i mamy sprawę załatwioną. Dzięki temu ESC rozpoznaje maksymalne wychylenie drążka gazu (PWM). Teraz tak jak widzicie na zdjęciach, ja regulator przymocowałem za pomocą koszulki termokurczliwej, ale taki regulator możemy zamocować za pomocą plastikowej opaski zaciskowej tzw. trytytki. Tutaj jest akurat wszytsko jedno, w jednej i drugiej metodzie regulator nam nie odpadnie. W sumie część drugą mamy za sobą więc możemy przejśc do następnego etapu.Trzeci etap #3 - podłaczanie ESC do APM i
podłaczanie nadajnika i GPS
Tutaj już nam zaczyna sie troche pod górkę. Ale każdą można pokonać bez większych problemów. I tak, wszytskie ESC musimy wpiąć w kanały Outputs. Problem w tym że nie możemy ich wpiąć “na pałe”. APM musi wiedzieć który silnik w którym miejscu . Na to jest metoda bo mamy schematy w internecie. Schemat dla APM wygląda tak : My skupiamy sie na obrazku po prawej stronie, ale jak już jesteśmy już przy tym temacie to w świecie dronów istnieje kilka ram w równym układzie. My najbardziej skupiamy sie na Quad X ponieważ ten układ jest najbardziej popularny, pewnie ze względu na to, że gdy przymocujemy kamerę do spodu drona,nie będziemy mieli ramiona i silnika w kadrze tak jak w układzie “Plusa” bądz “Krzyża”. Wiec ze schematu wynika, że silnik w górnej prawej częsci podłączamy do gniazda Outputs 1, silnik w dolnej lewej częsci do gniazda Outputs 2, silnik w górnej lewej części do gniazda 3 i w prawej dolnej częsci do gniazda nr 4. Takie podłączenie zapewni że arducopter będzie indywidulanie kontrolował każdy silnik co przełoży sie na to, że nasz Quad będzie latał. Teraz kiedy regulatory mamy podpięte, przechodzimy do podłaczenia nadajnika do Arducoptera. Tutaj mamy już z górki bo akurat przewody z nadajnika podłączamy 1-1 do arducoptera. Czyli po koleju kanał 1 w nadajniku podłaczamy do kanału 1 w arducoptrze, kanał drugi do drugiego itp. U mnie wygląda to następująco: A tutaj widok z góry, gdzie widać połaczenie do arducoptera: Jak możecie zobaczyć, kanał 3 w nadajniku mam wolny. Jest to spowodowane tym, że jestem w trackie regulacji ESC i chwilowo kanał 3 pozostawiłem wolny. No i tutaj możemy już zakończyć najtrudniejszą część. Teraz przejdzmy do podłaczenia anteny GPS. Tutaj również zalecam antenę zawiesić troche ponad APM, ponieważ cała elektronika w APM może mieć wpływ na GPS. Antena to koszt ok 20-30 zł na Allegro, wieć myślę że inwestycja się opłaci Podłączenie anteny jest banalnie proste. Z końcówki anteny wystają dwa przewody (Przeważnie, jezeli antena jest wyposażona również w kompas), więc nie mamy możliwości podłączenia jej innaczej. Jeden przewód podłaczamy do gniazda GPS a drugi do szyny I2C. Przewód 5-cio żyłowy to modół GPS a 2-wu żyłowy to kompas Musimy jeszcze odpowiednio ustawić kompas zgodnie z przodem modelu,w tym pomaga strzałka na antenie, a dla pewności że kierunek jest ok, możemy antenę rozebrać, odszukać mały czarny czip, i znaleść na niej oznaczenia zaczynający sie na literkę L albo A. Literki te wyznaczają kierunekCzwarty etap #4 - Podłaczanie napięcia do
APM i podłaczenie Telemetri
Jesteśmy już prawie na samym końcu. Mam nadzieje że wytłumaczyłem wszytsko do tej pory zrozumiale (Bardzo sie stram). Tutaj mamy już wszytsko złożone do kupy, lecz brakuje nam jeszcze jednego, napięcia do APM i podłączenie samej telemetri. Zacznijmy od APM i jego napięcia. Tutaj mamy również dwie metody doprowadzenia napięcia do płytki APM. Jak już wspomniałem wcześniej pierwsza możliwość to Power Module, które podłaczamy do płytki i do pakietu lipo. Mamy tutaj dość dobrą metodę, bo gdy podłaczymy napięcie do płytki przez Power Module, to na “sztucznym horyzoncie” w programie Mission Plenner (O nim w innym temacie) będziemy mogli obserwować napięcie pakietu lipo i natężenie prądku generowane przez silniki wyrażone w amperach (A). Musimy to odpowiednio przygotować, ale to wszytsko w zakładce “Konfiguracja APM”. Druga metoda to doprowadzenie napięcia po przez ESC, wtedy nie wiemy jakim napięciem dysponuje nasz pakiet, ani też nie możemy ustawić tzw. FailSave, który ochroni nasz pakiet, przed totalnym rozładowaniem. Działa to tak, że ustawiamy próg napięcia np. 10,5 V przy pakiecie 3S, po przeamaniu tego progu, APM wywołuje np RTL albo Landa czyli albo powrót w miejsce startu, albo ląduje tam gdzie sie znajduje. Opcja bardz oprzydatna. Aby pominąć Power Module, wystarczy zewrzeć zworkę JPI, wtedy APM będzie zasilany z ESC, jeżeli zostawimy ją rozwartą to oznacza to że zasilamy ją z power module. Power module podłaczamy do APM pod gniazdo “PM” Tak więc napięcie w APM już mamy. Teraz podłączmy Telemetrie. Tutaj nie ma nic trudnego, po prostu znajdujemy miejsce dla zamontowania nadajnika telemetrii,podłączamy do niego przewód a drugi koniec przewodu do gniazda “Telem”. I tutaj możemy już zakończyć składanie naszego drona, ponieważ złożyliśmy już wszytsko. Teram musimy przejść do podstawowej konfiguracji w programie Mission Plenner, i jeżeli wszytsko zostało podłączone właściwie, to całość konfiguracji powinno przejśc bez większych problemów. Cały dron wygląda tak:
A tutaj metoda na wtyki bananowe:

Uwaga
Masz jakieś pytania albo uwagi, co do treści strony ?
Proszę pisz e-mail klikając w odnośnik obok,będe bardzo
wdzięczny za każde uwagi

