
DIY DRONES



UWAGA
Pamiętaj o tym aby przy pracy zawsze zdejmować śmigła z silników koptera,nie rób niczego przy założonych silnikach. Silniki kręcą sie bardzo szybko a śmigła są bardzo ostre,więc nie mają trudności z przecięciem skóry albo obcięciem palców. Pamiętaj też, że elektronika jest zawodna
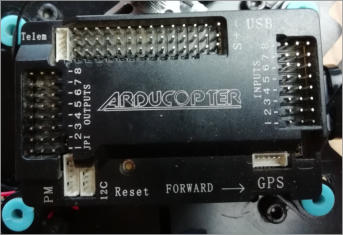
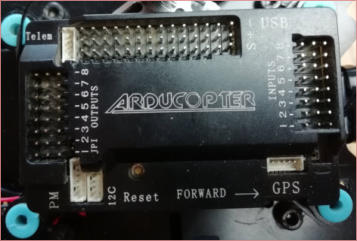
AMP(Autopilot MultiPlatform) - Chyba najbardziej
znany kontroler lotu w świecie modelarzy. Przez
wielu uznany jako “Trudny”, ze względu na
rozmaitość funkcji i możliwości. Na ten moment
projekt to Open Source, czyli otwarte oprogramowanie
dla programistów, dzięki czemu projekt cały czas
jest rozwijany przez liczą społeczność. Do tej pory
powstało już kilka wersji, lecz nie służy tylko
dronom ale i łodzą, samochodom RC, samolotą no i oczywiście
drony. Najnowszą wersją APM na ten moment
jest wersja 2.8 a najstarsza to 3.1, która była pozbawiona
magnetometru.
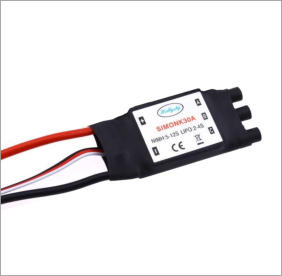
ESC (Electronic Speed Controller) - Czyli po prostu regulator
prędkości obrotowej silnika. Ma za zadanie tak kontrolować
napięcie, aby silnik kręcił sie z odpowiednia prędkością taką
jaką ustawimy drążkiem gazu (PWM). Część składa się przeważnie
z 8 trazystorów Mosfet, kondesatora elektrolitycznego o wartości
470 uF i 25 V i kilku innych bardzo drobnych elementów.
Ze względu na trazystory Mosfet, górna część regulatora to radiator
odprowadzający ciepło, dlatego też najlepiej umieszczać je blisko silnika,
zaraz pod śmigłem, gdyż obracające sie śmigło, przy okazji będzie “regiel”
chłodzić. W dronach muszą być 4,6 lub 8 w zależności od składanego
drona (Quad,hexa, octa itp.). Istnieją na rynku również regulatory 4in1,
które są wszytskim w jednym, wybór zależy już od użytkowanika,
ponieważ zasada działa jest ta sama.
Silnik Bezszczotkowy (Brushless Motor) - Silnik elektryczny, wykorzystany
do obrotu śmigła, dzięki czemu wytworzenia siły nośnej. Różni
sie od silników szczotkowych tym, że jest po prostu pozbawiony szczotek,
a to przekłada sie na jego dłuższą eksploatacje. W silnikach
bezszczotkowych, cały wał razem z obudową zewnętrzną obracają sie,
w silnikach szczotkowych,prąd podawany jest na komutator silnika
po przez szczotki, dzięki czemu wał obraca sie, a cała obudowa nie
kręci sie wokół własnej osi. Istnieją dwa typy silników - CW (ClockWise)
czyli kręcące sie zgodnie ze wskazówkami zegara i CCW (CounterClockWise)
czyli przeciwnie do wskazówek zegara. W silnikach bezszczotkowych
możemy obrócić polaryzację, dzięki czemu uzyskamy kierunek CW albo CCW
Teoria

Aparatura (Apka) - Urządzenie sterujące, przez początkujących
nazywane “pilotem sterowania”. Służy do kontroli modelu latającego
przez pilota. Dzisiejsze aparatury posiadają wiele kanałów do sterowania
nie tylko wysokością i ruchem poziomym ale np. do sterowania kamerą,
gimbalem, ledami itp. Bardziej zaawansowane aparatury posiadają
duże wyświetlacze, na których sa w stanie wyswietlić np, dane
telemetryczne, stan naładowania baterii oraz tryb FailSave (Tryb , który
ma za zadanie ochronić nasz model w sytuacjach kryzysowych, np. gdy
zgubi sygnał z aparatury to ma wykonać tzw RTL czyli Return To Lunch
czyli powrót w miejsce startu.) Moja aparatura to model FlySky FS-T6
nie posiadająaca FailSave, ale posiadająca tylko 6 kanałów

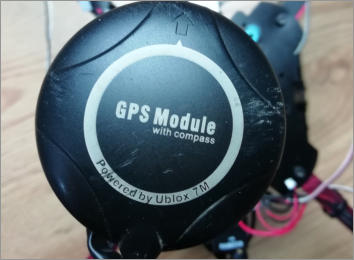
GPS (Global Positioning System) - System pozycjonowania. W dzisiejszych
dronach antena i modół GPS jest nie bezpowodu. Po za barometrem,
który określa wysokość modelu, żyroskopu który określa poziom i
kompasu, który określa kierunek, w jakim znajduje sie model to właśnie
GPS ustabilizuje nam model z dokładnością +- 1 metr.
Przed startem należy odczekać z 3 minuty aby GPS mugł “złapać”
wystarczającą ilość satelit (3D FIX czyli 3 satelity i na podstawie 3
satel już jest w stanie określić położenie modelu.). GPS przydaje sie w
trybach tkj:
- AltHolt czyli utrzymanie wysokości
- Loiter, który utrzymuje dokładną pozycje i nic nie jest w stanie go z niej
wytrącić
- RTL czyli automatyczny powrót w miejsce startu
Telemetria - w sumie ten termin nie jest nam obcy, bo wykorzystywany
nie tylko w modelarstwie. W modelarstwie jest wykorzystywany do
przesyłania danych z modelu do komputera lub tabletu. Działają
przeważnie na częsotliwości 433 Mhz lub 915 Mhz ale są również
inne częstotliwości. Bardzo pomocne przy konfigurowaniu koptera
np. kalibracja kompasu. Taka telemetria składa sie z dwóch części:
Części do naziemnej stacji:


I części do drona:
Pakiet Li-Po - można by było powiedzieć że pakiety litowo-polimerowe to
serce naszego drona. Nie mniej jednak tak jest, ponieważ bez prądu nie
polecimy nigdzie. Pakiety litowo polimerowe przyjeły sie bardzo dobrze
w świecie dronów i w świecie modelarzy ze względu na swoje liczne zalety.
Między innymi rozładowywanie pakietu. Normalna
bateria w latarce działa,i jak mamy latarkę zaświeconą, to wraz ze
wzrostem czasu ta latarka będzie powoli gasła bo po prostu będzie
jej brakować prądu. W akumulatorach lipo tak nie ma. Latarka będzie
świecić cały czas tak samo,aby na końcu zgasnąć całkiem.
Również wydajność prądowa jest wyższa niż np. w akumulatorach 18650.
Niestety mają też swoje wady. Nawet nie wielkie przekłucie akumulatora
powoduje dym i pożar. Nad pakietem lipo należy mieć stałą kontrole
podczas ładowania,nie możemy jej ładować byle jaką ładowarką.
Nie możemy też rozładować go tak, aby napięcie spadło poniżej 3,0 V na jedną cele. Ale musimy też coś wiedzieć na jej temat. Zrobiłem
o pakietach lipo osobny temat, ale wytłumaczę troche teorii o nich. Przeważnie mają 3 oznaczenia. Wydajność prądowa wyrażoną
literką “C”, pojemność pakietu oznaczone w mAh oraz ilość cel w pakiecie (Przykładowo - 3S lub 4S). Z oznaczeniem “S” nie ma
problemu, “S” to poprostu cela,a liczba przed nią to ilość tych cel w pakiecie. Czyli jeżeli mamy pakiet 3S to znaczy że w pakiecie
znajdują sie 3 akumulatory lipo po 3,7V (Nominalne 4,2). I tutaj w sumie wychodzi nam 11,1 V a w efekcie pakiet ma 12,6 V jeżeli
dokonamy pomiaru multimetrem. Wydajność prądowa to inna sprawa, określa tak jak by wytrzymałość pakietu. Liczbę “C” mnożymy
przez 5 i wychodzi nam liczba wyrażona w amperach (A). To ta wartość jest dla nas istotna, ponieważ wyraża to ile pakiet jest w stanie
wytrzymać bez uszkodzenia. Ale spokojnie, pakiet 3S i 20C w zupełności wystarczy. Popatrzmy na to tak:
20C * 5 = 100 A
Czyli pakiet wytrzyma prąd o maksymalnym natężeniu 100 amper. Teraz policzmy ile potrzebują silniki naszego drona. Zależy jakie
silniki, średnio jest to maks do 18 amper przy maksymalnej prędkości,tak więc:
18 * 4 = 72 A
Czyli silniki przy maksymalnych obrotach wygenerują prąd o natężeniu 72 ampery czyli sporo nam jeszcze zostaje. Teraz zostaje nam
jeszcze pojemność. Oznacza się ją w mAh. Pojemność to jak sama nazwa mówi ilość “prądu” jaką jest w stanie pakiet pomieścić. I
tutaj nie ma co sie opisywać.

Śmigła (Propeller) - Istotna część drona,z reszta nie ma się co dziwić, gdyż to
właśnie śmigła mają za zadanie wytworzyć odpowiednią siłę nośną tak aby
model mógł unieść się w powietrze. Są różne rodzaje śmigieł, dwupłatowe,
trzypłatowe i trafiają sie nawet 4 i 5 ale te śmigła są bardziej do samolotów RC
niż do dronów. Trafiają sie czasem śmigła składane .Pisałem już wcześniej o
śmigłach, mają one również swój
kierunek. Muszą obracać sie w odpowiednim kierunku. Są śmigła
tzw. Prawe i Lewe,albo prościej pchające i ciągnące. O tym wiele nie opowiem
bo sam na ten temat mam małą wiedzę, wiem że śmigła mają oznaczenia
tkj. np 1045r. Tak jest w moim przypadku,10 to długość śmigła mierzona w
calach a 45 to 4,5 cala, tutaj chodzi o skok śmigła. Do dużych dronów stosuje
się większe śmigła z małym skokiem, gdyż duży dron nie potrzebuje szybkiej
reakcji na zmiane kierunku lotu tak jak ma to miejsce w dronach typu Racing.
Ogólnie im większy skok śmigła, tym chybszy jest dron bo wytwarza większą siłę nośną.
Zbudowane są przeważnie z różnego rodzaju tworzyw sztucznych tkj. ABS albo Carbon lub Nylon.
Musimy wybrać odpowiednie,tak aby były giętkie (Nie łamią się przy pierwszej kolizji),ale
na tyle twarde by nie wpadały we flatter (Zjawisko występujące w wirnikowacach, prędkość obrotowa
silnika powoduje drgania śmigła co bardzo nie kożystnie wpływa na model). Gdy montujemy śmigła na model,
nie powinny one być uszkodzone tak jak na zdjęciu powyżej.

Oczywiście nie możemy zacząć budowy drona bez odpowiedniej wiedzy.
W tym dziala opowiem wszytsko co i jak, same podstawowe tematy, bez
których nie ruszymy z miejsca. Zaczynamy!












DIY DRONES



Oczywiście nie możemy zacząć budowy drona bez odpowiedniej wiedzy.
W tym dziala opowiem wszytsko co i jak, same podstawowe tematy, bez
których nie ruszymy z miejsca. Zaczynamy!
AMP(Autopilot MultiPlatform) - Chyba najbardziej
znany kontroler lotu w świecie modelarzy. Przez
wielu uznany jako “Trudny”, ze względu na
rozmaitość funkcji i możliwości. Na ten moment
projekt to Open Source, czyli otwarte oprogramowanie
dla programistów, dzięki czemu projekt cały czas
jest rozwijany przez liczą społeczność. Do tej pory
powstało już kilka wersji, lecz nie służy tylko dronom ale i łodzą,
samochodom RC, samolotą no i oczywiście drony. Najnowszą wersją
APM na ten moment jest wersja 2.8 a
najstarsza to 3.1, która była
pozbawiona magnetometru.
ESC (Electronic Speed Controller) - Czyli po prostu regulator
prędkości obrotowej silnika. Ma za zadanie tak kontrolować
napięcie, aby silnik kręcił sie z odpowiednia prędkością taką
jaką ustawimy drążkiem gazu (PWM). Część składa się przeważnie
z 8 trazystorów Mosfet, kondesatora elektrolitycznego o wartości
470 uF i 25 V i kilku innych bardzo drobnych elementów.
Ze względu na trazystory Mosfet, górna część regulatora to radiator
odprowadzający ciepło, dlatego też najlepiej umieszczać je blisko
silnika, zaraz pod śmigłem, gdyż obracające sie śmigło, przy okazji
będzie “regiel” chłodzić. W dronach muszą być 4,6 lub 8 w zależności
od składanego drona (Quad,hexa, octa itp.). Istnieją na rynku również
regulatory 4in1, które są wszytskim w jednym, wybór zależy już od
użytkowanika,ponieważ zasada działa jest ta sama.
Silnik Bezszczotkowy (Brushless Motor) - Silnik elektryczny,
wykorzystany do obrotu śmigła, dzięki czemu wytworzenia siły nośnej.
Różni sie od silników szczotkowych tym, że jest po prostu pozbawiony
szczotek, a to przekłada sie na jego dłuższą eksploatacje.
W silnikach bezszczotkowych, cały wał
razem z obudową zewnętrzną obracają sie, w silnikach szczotkowych,
prąd podawany jest na komutator silnika po przez szczotki, dzięki
czemu wał obraca sie, a cała obudowa nie kręci sie wokół własnej osi.
Istnieją dwa typy silników - CW (ClockWise) czyli kręcące sie zgodnie ze
wskazówkami zegara i CCW (CounterClockWise) czyli przeciwnie do
wskazówek zegara. W silnikach bezszczotkowych możemy obrócić
polaryzację, dzięki czemu uzyskamy kierunek CW albo CCW
Teoria
Aparatura (Apka) - Urządzenie sterujące, przez początkujących
nazywane “pilotem sterowania”. Służy do kontroli modelu latającego
przez pilota. Dzisiejsze aparatury posiadają wiele kanałów do sterowania
nie tylko wysokością i ruchem poziomym ale np. do sterowania kamerą,
gimbalem, ledami itp. Bardziej zaawansowane aparatury posiadają
duże wyświetlacze, na których sa w stanie wyswietlić np, dane
telemetryczne, stan naładowania baterii oraz tryb FailSave (Tryb , który
ma za zadanie ochronić nasz model w sytuacjach kryzysowych, np. gdy
zgubi sygnał z aparatury to ma wykonać tzw RTL czyli Return To Lunch
czyli powrót w miejsce startu.) Moja aparatura to model FlySky FS-T6
nie posiadająaca FailSave, ale posiadająca tylko 6 kanałów
GPS (Global Positioning System) - System pozycjonowania. W
dzisiejszych dronach antena i modół GPS jest nie bezpowodu.
Po za barometrem, który określa wysokość modelu, żyroskopu który
określa poziom i kompasu, który określa kierunek, w jakim znajduje
sie model to właśnie GPS ustabilizuje nam model z dokładnością
+- 1 metr. Przed startem należy odczekać z 3 minuty aby GPS mógł
“złapać” wystarczającą ilość satelit (3D FIX czyli 3 satelity i na
podstawie 3 satelit już jest w stanie określić położenie modelu.).
GPS przydaje sie w trybach tkj:
- AltHolt czyli utrzymanie wysokości
- Loiter, który utrzymuje dokładną pozycje i nic nie jest w stanie go z
niej wytrącić
- RTL czyli automatyczny powrót w miejsce startu
Telemetria - w sumie ten termin nie jest nam obcy, bo wykorzystywany
nie tylko w modelarstwie. W modelarstwie jest wykorzystywany do
przesyłania danych z modelu do komputera lub tabletu. Działają
przeważnie na częsotliwości 433 Mhz lub 915 Mhz ale są również
inne częstotliwości. Bardzo pomocne przy konfigurowaniu koptera
np. kalibracja kompasu. Taka telemetria składa sie z dwóch części:
Części do naziemnej stacji:


I części do drona:
Pakiet Li-Po - można by było powiedzieć że pakiety litowo-polimerowe to
serce naszego drona. Nie mniej jednak tak jest, ponieważ bez prądu nie
polecimy nigdzie. Pakiety litowo polimerowe przyjeły sie bardzo dobrze
w świecie dronów i w świecie modelarzy ze względu na swoje liczne
zalety.
Między innymi rozładowywanie pakietu. Normalna
bateria w latarce działa,i jak mamy latarkę zaświeconą, to wraz ze
wzrostem czasu ta latarka będzie powoli gasła bo po prostu będzie
jej brakować prądu. W akumulatorach lipo tak nie ma. Latarka będzie
świecić cały czas tak samo,aby na końcu zgasnąć całkiem.
Również wydajność prądowa jest wyższa niż np. w akumulatorach 18650.
Niestety mają też swoje wady. Nawet nie wielkie przekłucie akumulatora
powoduje dym i pożar. Nad pakietem lipo należy mieć stałą kontrole
podczas ładowania,nie możemy jej ładować byle jaką ładowarką.
Nie możemy też rozładować go tak, aby napięcie spadło poniżej 3,0 V na
jedną cele. Ale musimy też coś wiedzieć na jej temat. Zrobiłem
o pakietach lipo osobny temat, ale wytłumaczę troche teorii o nich.
Przeważnie mają 3 oznaczenia. Wydajność prądowa wyrażoną
literką “C”, pojemność pakietu oznaczone w mAh oraz ilość cel w pakiecie
(Przykładowo - 3S lub 4S). Z oznaczeniem “S” nie ma
problemu, “S” to poprostu cela,a liczba przed nią to ilość tych cel w
pakiecie. Czyli jeżeli mamy pakiet 3S to znaczy że w pakiecie
znajdują sie 3 akumulatory lipo po 3,7V (Nominalne 4,2). I tutaj w sumie
wychodzi nam 11,1 V a w efekcie pakiet ma 12,6 V jeżeli
dokonamy pomiaru multimetrem. Wydajność prądowa to inna sprawa,
określa tak jak by wytrzymałość pakietu. Liczbę “C” mnożymy
przez 5 i wychodzi nam liczba wyrażona w amperach (A). To ta wartość
jest dla nas istotna, ponieważ wyraża to ile pakiet jest w stanie
wytrzymać bez uszkodzenia. Ale spokojnie, pakiet 3S i 20C w zupełności
wystarczy. Popatrzmy na to tak:
20C * 5 = 100 A
Czyli pakiet wytrzyma prąd o maksymalnym natężeniu 100 amper. Teraz
policzmy ile potrzebują silniki naszego drona. Zależy jakie
silniki, średnio jest to maks do 18 amper przy maksymalnej prędkości,tak
więc:
18 * 4 = 72 A
Czyli silniki przy maksymalnych obrotach wygenerują prąd o natężeniu 72
ampery czyli sporo nam jeszcze zostaje. Teraz zostaje nam
jeszcze pojemność. Oznacza się ją w mAh. Pojemność to jak sama nazwa
mówi ilość “prądu” jaką jest w stanie pakiet pomieścić. I
tutaj nie ma co sie opisywać.

Śmigła (Propeller) - Istotna część drona,z reszta nie ma się co dziwić,
gdyż to
właśnie śmigła mają za zadanie wytworzyć odpowiednią siłę nośną tak
aby model mógł unieść się w powietrze. Są różne rodzaje
śmigieł,dwupłatowe,trzypłatowe i trafiają sie nawet 4 i 5 ale te śmigła są
bardziej do samolotów RC niż do dronów. Trafiają sie czasem śmigła
składane .Pisałem już wcześniej o śmigłach, mają one również swój
kierunek. Muszą obracać sie w odpowiednim kierunku. Są śmigła
tzw. Prawe i Lewe,albo prościej pchające i ciągnące. O tym wiele nie
opowiem bo sam na ten temat mam małą wiedzę, wiem że śmigła mają
oznaczenia tkj. np 1045r. Tak jest w moim przypadku,10 to długość śmigła
mierzona w calach a 45 to 4,5 cala, tutaj chodzi o skok śmigła. Do dużych
dronów stosuje się większe śmigła z małym skokiem, gdyż duży dron nie
potrzebuje szybkiej reakcji na zmiane kierunku lotu tak jak ma to miejsce
w dronach typu Racing. Ogólnie im większy skok śmigła, tym chybszy jest
dron bo wytwarza większą siłę nośną. Zbudowane są przeważnie z
różnego rodzaju tworzyw sztucznych tkj. ABS albo Carbon lub Nylon.
Musimy wybrać odpowiednie,tak aby były giętkie (Nie łamią się przy
pierwszej kolizji),ale na tyle twarde by nie wpadały we flatter (Zjawisko
występujące w wirnikowacach, prędkość obrotowasilnika powoduje
drgania śmigła co bardzo nie kożystnie wpływa na model). Gdy
montujemy śmigła na model,nie powinny one być uszkodzone tak jak na
zdjęciu powyżej.




