DIY DRONES


Konfiguracja APM
Teraz musimy odpowiednio skonfigurować APM przed lotem
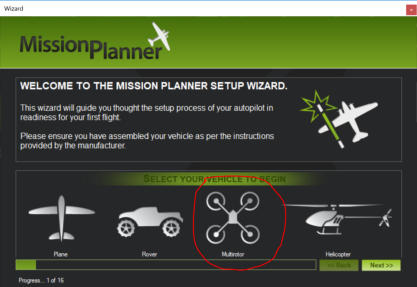
Skoro mamy już drona w całości złożonego, to nic nie stoi na przeszkodzie aby w koncu wstępnie skonfigurować naszą płytkę APM. Po mimo tego że telemetrie mamy podłaczoną, musimy wyposażyć sie w przewód micro USB, ponieważ będziemy musieli wgrać oprogramowanie dla drona do naszej płytki, niestety nie możemy tego zrobić za pomocą telemetri. Tak więc zacznijmy od początku. Odpalamy program Mission Plenner (Do pobrania w dziale download), i jeżeli program sie odpali po raz pierwszy przywita nas tzw. Wizard. Służy on początkującym do podstawowej konfiguracji,aby nie robiła ona większych problemów. Od razu możemy przejsć do zakładki “Install Setup” Tutaj przechodzimy do “Install Firmware” (Nie klikamy jeszcze “connect”) i wybieramy nasz Quadcopter. Po zakonczeniu możemy kliknąć “Connect” i połączyć płytkę. Pamiętajmy żeby nie klikać Connect przed wgrywaniem Firmware drona do APM.

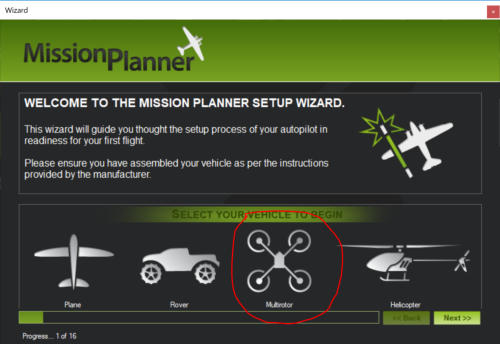
Teraz przechodzimy do “Wizard”, Tam już nam powinno pójść bardzo prosto jezeli będzemy robić to co nam powie program. Na
tym etapie wybieramy znowu nasz multirotor:
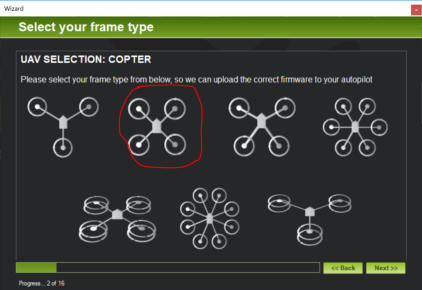
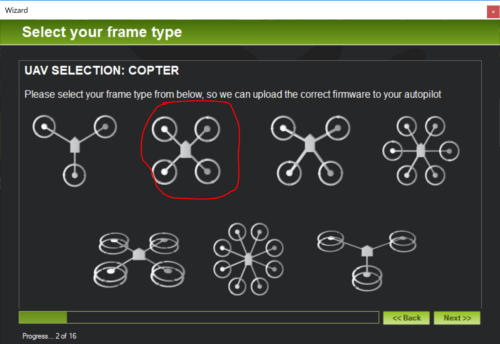
Następnie wybieramy typ ramy naszego drona:
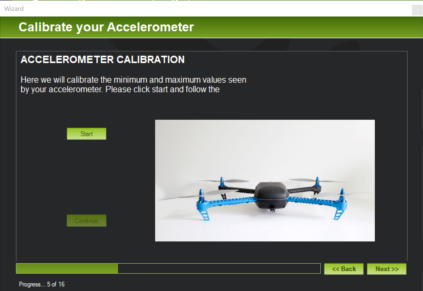
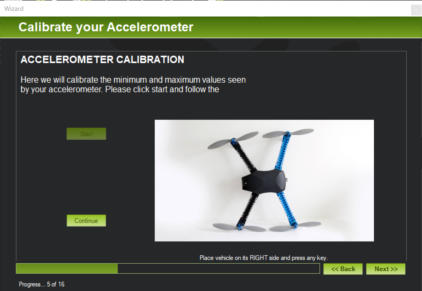
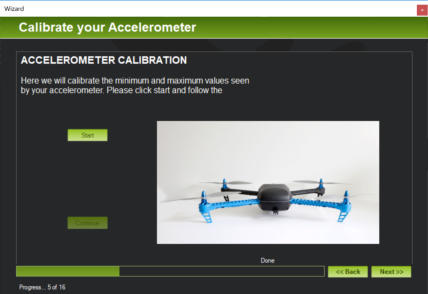
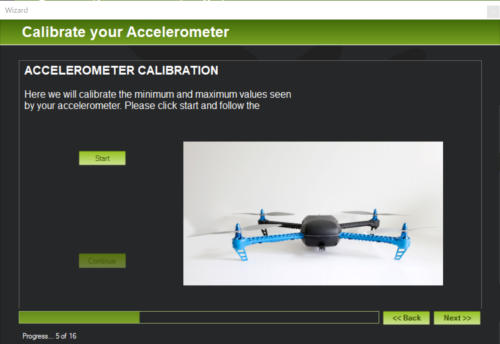
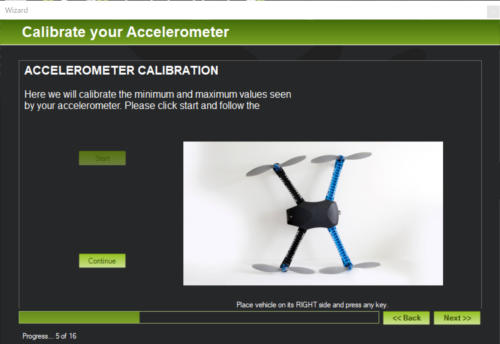
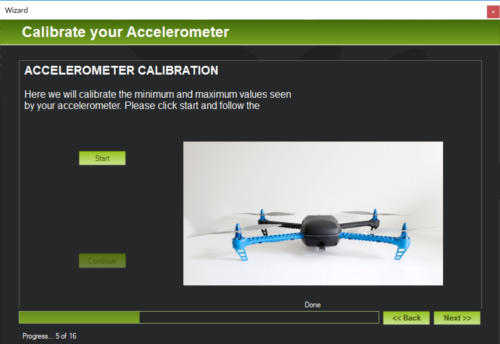
Klikamy next i przystęujemy do konfiguracji akcelerometra. I tak po koleju stawiamy kopter na ziemi i klikamy start:
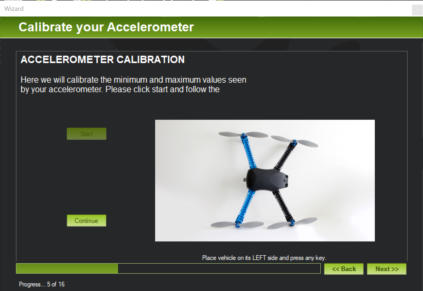
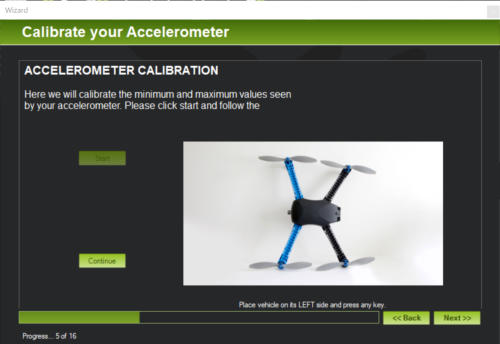
Później stawiamy drona na lewą strone:
I na prawą:
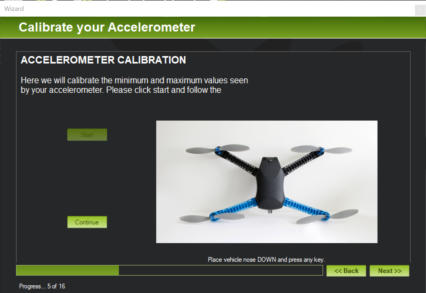
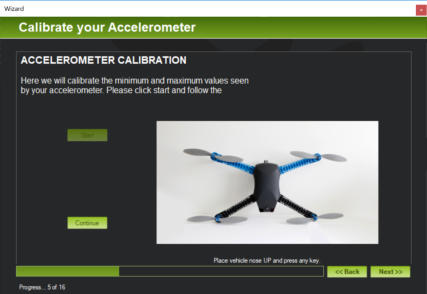
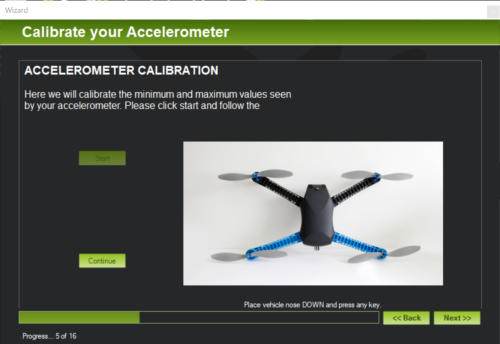
Dołem:
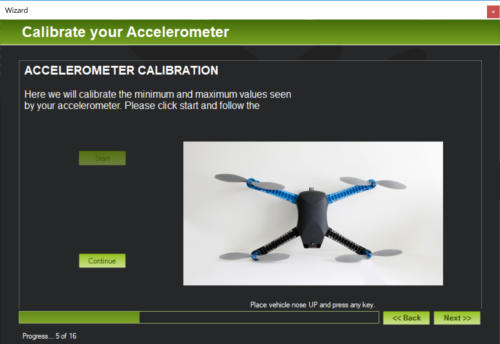
Górą:
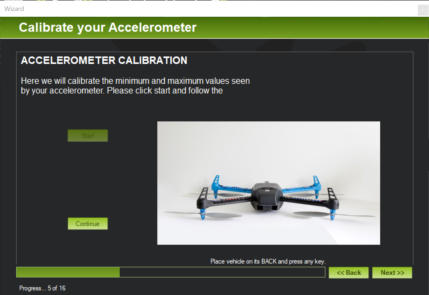
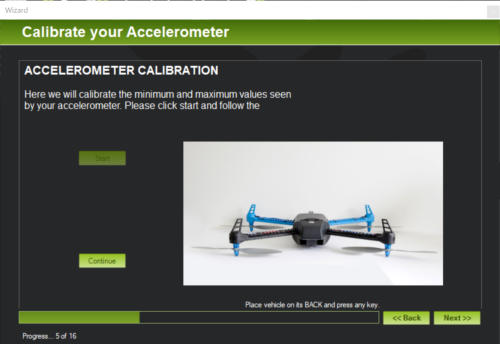
No i na plecach:
i jak wszytsko pójdzie ok to zobaczymy okno z napisem Done:
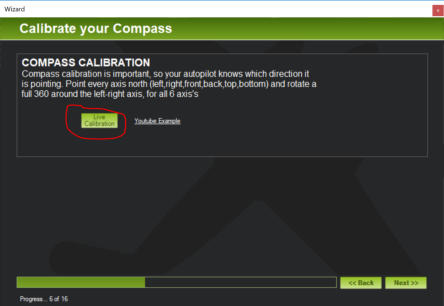
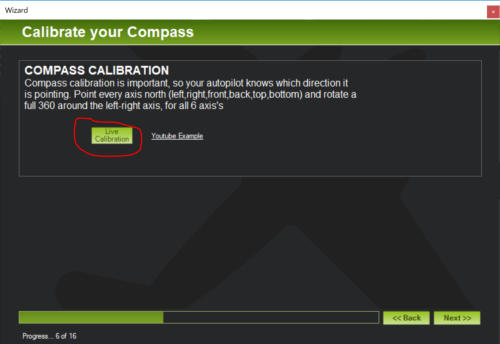
Następny proces jest troszkę trudniejszy. Polega on na tym, że musimy skalibrować kompas i zebrać kilka próbek dla kompmasu i APM. W tym celu
klikamy “Live Calibration” i machamy dronem we wszytskie strony świata, tak aby Kompas zebrał odpowiednią ilość próbek. Proces ten pominę bo nie
powinien nastręczyć problemami. W razie kłopotów możemy konfigurację oglądnąć na YouTube klikając w hiperłącze po prawej stronie od
“Live Calibration”:
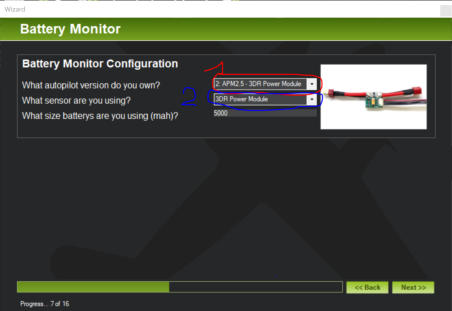
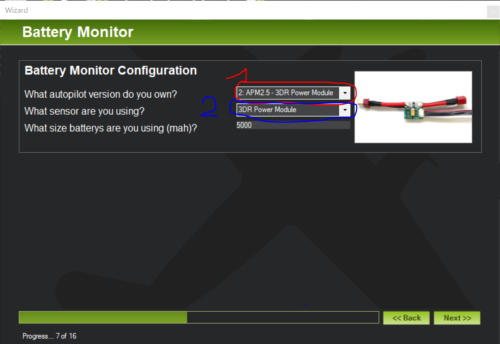
Następny krok to właśnie Power Module. Jeżeli APM jest podpięty po przez PM to odpowiednio go teraz skonfigurujemy. Tak wiec w pozycji pierwszej
zaznaczonej kolorem czerwonym wybieramy z listy rozsówanej “APM 2.5 - 3DR Power Module”. Z następnej listy oznaczonej kolorem niebieskim
wybieramy “3DR Power Module”. W ostatniej pozycji wpisujemy pojemność w mAH naszego pakietu li-po:
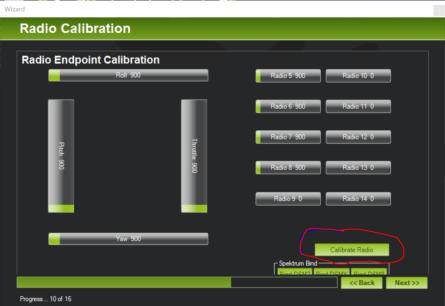
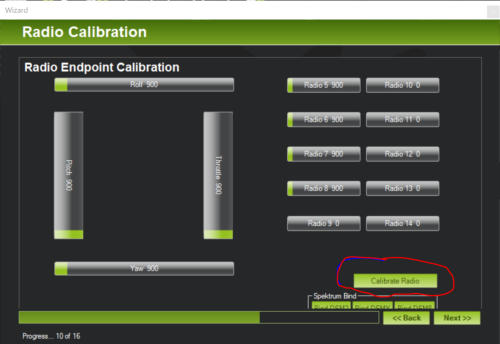
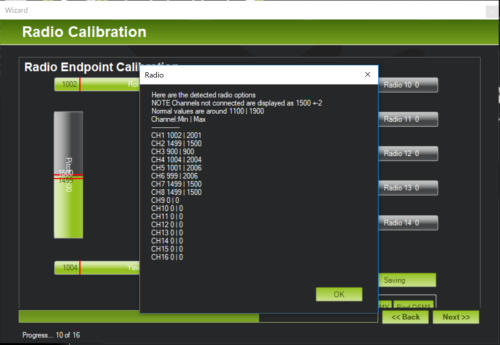
Następna pozycja to sonar, ale jest nam on nie potrzebny więc przeskakujemy dalej. Dalsza pozycji to End Pointy aparatury. Tutaj musimy wziąść
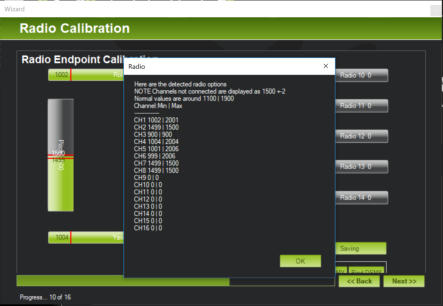
aparaturę do ręki, włączyć ja. Klikamy przycisk “Continue”. Teraz kliknięciem na przycisk “Calibrate radio” zostaniemy przeniesieni do
kalibracji aparatury:
Teraz maksymalnie wychylamy wszytskie drążki na aparaturze, po tym zabiegu klikamy “Done” i wyskoczy nam takie okno:
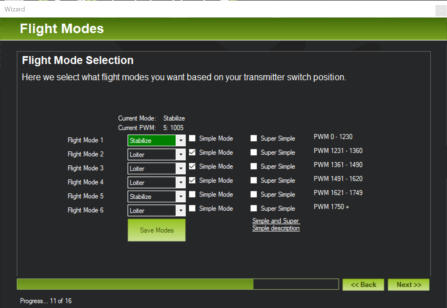
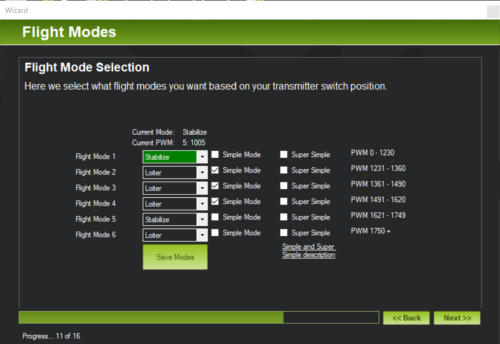
Następna pozycja to ustawienie trybów lotu w zależności od położenia PWM czyli któregoś z przełączników na aparaturze. Najlepiej zostawić
sobie narazie tryb “Stabilizate” i odznaczyć tryb “Super simple” i “simple”:
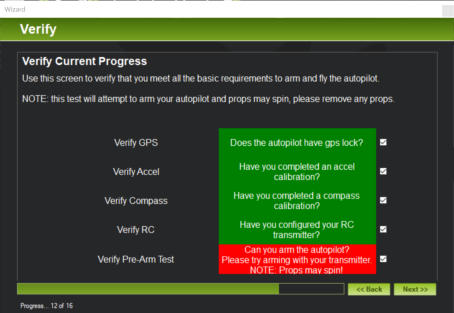
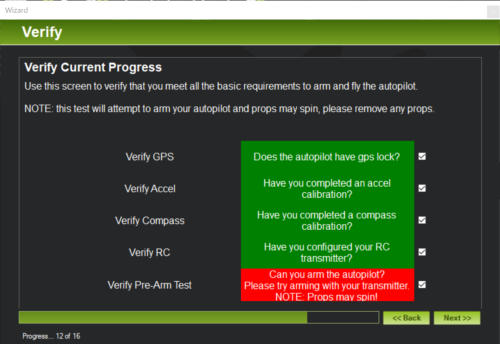
Nastepne pozycje możemy przeklikać aż do podsumowania wszytskiego. Ostatnio sprawą jaka nam została to sprawdzenie czy silniki się uzbrajają
Jak uzbroić silniki ? - prosto, wystarczy dzwignię gazu dać maksymalnie w dół i maksymalnie w prawo, i tak trzymać przez ok 5 sekund (Nie trzymać
dłużej ponieważ po 15 sekundach takiego trzymania APM przejdzie w tryb autotrymowania). Jeżeli wszytsko zaświeci się na zielono, to dron jest
wstępnie gotowy do lotu. Tutaj w moim przypadku uzbrojenie nie udało sie, z bardzo prostej przyczyny, dalej nie podłączyłem kanału 3 w APM i po
prostu APM nie wykrywa przesunięcia dzwigni gazu
Tutaj jeszcze nie będe kończył. Wspominałem wcześniej o trybie RTL czyli powrót w miejsce startu. W ty momencie sprawa nie jest taka prosta, bo
musimy sobie ustawić kilka ważnych parametrów. Żebyście omineli te problemy postaram sie wam wszystko opisać.
Mój dron po wzniesieniu się i uruchomieniu funkcji RTL cofa się w miejsce startu i powoli zaczyna lądowanie. Możemy zrobić to na kilka sposobów,
między innymi możemy zrobić tak aby dron wycował sie na miejsce startu, ale na określonej wysokości. Możemy to zrobić za pomoca parametru:
RTL_ALT - Tutaj ustawiamy wysokość, na jaką ma wzbić się model po wywołaniu funkcji RTL. Ja wysokość mam ustawioną na 0 więc dron wraca na
miejsce z taką wysokością jaką ma aktualnie.
Kiedy dron będzie już schodził na ziemie możemy mu również wydać komendę aby przed ziemią zatrzymał sie na chwile. Służy do tego parametr:
RTL_ALT_FINAL - Parametr ten daje nam możliwość ustawienia w cm, na jakiej wysokości dron ma zawisnąć i tą wysokość będzie utrzymywać.
Oczywistym jest faktem, że ustawienie tego parametru na 0 spowoduje całkowite wylądowanie na ziemie
Możemy również ustawić szybkość opadania drona w trybie RTL. Robimy to za pomocą parametru:
RTL_SPEED - Wyrażony w cm/s,prędkość opadania,możemy ustawić parametr na 0 wieć APM wtedy przyjmie wartość domyślą
Geofencing
Nie bezpotrzeby wspominam o geofencingu. Geofence to takie troche zabepieczenie naszego modelu przed ucieczką. Na samym początku należy
ustawić jak najmniejszą wartość. Czyli tak, ustawiamy wysokość i szerokość, po przekroczeniu tych punktów dron albo wykona komendę RTL albo Land
czyli wyląduje.GeoFencing znajdziemy w zakładce “Config Tuning” - “GeoFence”.
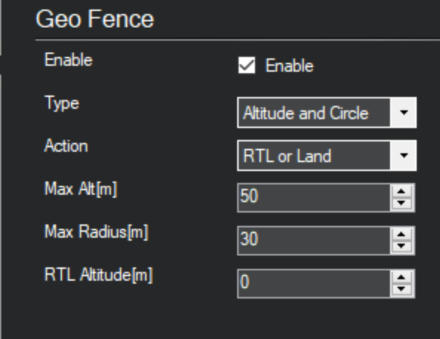
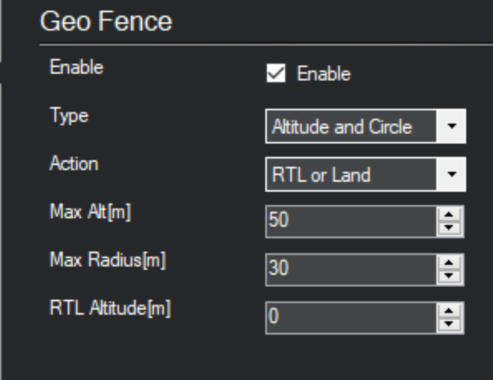
Oczywiście wszytskie parametry możemy ustawić tak jak to jest widoczne na załączonym obrazku. Ale ja i tak wytłumacze wam co i jak. Oczywiście
musimy zaznaczyć “Enable”. Pierwsza pozycja to “Type”. Wybieramy z rozsówanej listy, typ naszej geo bariery. I tak:
- None
- Altitude
- Circle
- Altitiude and Circle itp
Altitiude to z angielskiego wysokość, natomiast Circle to okręg. Wiec w tym przypadku najkożystnieszym dla nas będzie opcja Wysokości i okręgu
(Altitude and Circle). Czyli maksymalna wysokość to 50 metrów a okręg ma 30 metrów. Po przekroczeniu tej bariery dron wraca w miejsce startu
albo ląduje












DIY DRONES





Koszt drona
- 4 Silniki (200-300zł) - 4 Regulatory ESC (200zł) - Rama Quadcopter (150 zł) - Arducopter 2.6 (260 zł) - Płytka antywibracyjna (20 zł) - Statyw pod GPS (20-30zł) - Telemetria 433 mHz (140 -200zł) - Aparatura (od 200 - 800 zł) - Przewody (5 - 20 zł) Wszytskie te elementy kupimy w sklepie ABC-RC

Konfiguracja APM
Teraz musimy odpowiednio skonfigurować
APM przed lotem
Skoro mamy już drona w całości złożonego, to nic nie stoi na przeszkodzie aby w koncu wstępnie skonfigurować naszą płytkę APM. Po mimo tego że telemetrie mamy podłaczoną, musimy wyposażyć sie w przewód micro USB, ponieważ będziemy musieli wgrać oprogramowanie dla drona do naszej płytki, niestety nie możemy tego zrobić za pomocą telemetri. Tak więc zacznijmy od początku. Odpalamy program Mission Plenner (Do pobrania w dziale download), i jeżeli program sie odpali po raz pierwszy przywita nas tzw. Wizard. Służy on początkującym do podstawowej konfiguracji,aby nie robiła ona większych problemów. Od razu możemy przejsć do zakładki “Install Setup” Tutaj przechodzimy do “Install Firmware” (Nie klikamy jeszcze “connect”) i wybieramy nasz Quadcopter. Po zakonczeniu możemy kliknąć “Connect” i połączyć płytkę. Pamiętajmy żeby nie klikać Connect przed wgrywaniem Firmware drona do APM. Tutaj przechodzimy do “Install Firmware” (Nie klikamy jeszcze “connect”) i wybieramy nasz Quadcopter. Po zakonczeniu możemy kliknąć “Connect” i połączyć płytkę. Pamiętajmy żeby nie klikać Connect przed wgrywaniem Firmware drona do APM. Teraz przechodzimy do “Wizard”, Tam już nam powinno pójść bardzo prosto jezeli będzemy robić to co nam powie program. Na tym etapie wybieramy znowu nasz multirotor: Następnie wybieramy typ ramy naszego drona: Klikamy next i przystęujemy do konfiguracji akcelerometra. I tak po koleju stawiamy kopter na ziemi i klikamy start: Później stawiamy drona na lewą strone: I na prawą: Dołem: Górą: No i na plecach: i jak wszytsko pójdzie ok to zobaczymy okno z napisem Done: Następny proces jest troszkę trudniejszy. Polega on na tym, że musimy skalibrować kompas i zebrać kilka próbek dla kompmasu i APM. W tym celu klikamy “Live Calibration” i machamy dronem we wszytskie strony świata, tak aby Kompas zebrał odpowiednią ilość próbek. Proces ten pominę bo nie powinien nastręczyć problemami. W razie kłopotów możemy konfigurację oglądnąć na YouTube klikając w hiperłącze po prawej stronie od “Live Calibration”: Następny krok to właśnie Power Module. Jeżeli APM jest podpięty po przez PM to odpowiednio go teraz skonfigurujemy. Tak wiec w pozycji pierwszej zaznaczonej kolorem czerwonym wybieramy z listy rozsówanej “APM 2.5 - 3DR Power Module”. Z następnej listy oznaczonej kolorem niebieskim wybieramy “3DR Power Module”. W ostatniej pozycji wpisujemy pojemność w mAH naszego pakietu li-po: Następna pozycja to sonar, ale jest nam on nie potrzebny więc przeskakujemy dalej. Dalsza pozycji to End Pointy aparatury. Tutaj musimy wziąść aparaturę do ręki, włączyć ja. Klikamy przycisk “Continue”. Teraz kliknięciem na przycisk “Calibrate radio” zostaniemy przeniesieni do kalibracji aparatury: Teraz maksymalnie wychylamy wszytskie drążki na aparaturze, po tym zabiegu klikamy “Done” i wyskoczy nam takie okno: Następna pozycja to ustawienie trybów lotu w zależności od położenia PWM czyli któregoś z przełączników na aparaturze. Najlepiej zostawić sobie narazie tryb “Stabilizate” i odznaczyć tryb “Super simple” i “simple”: Nastepne pozycje możemy przeklikać aż do podsumowania wszytskiego. Ostatnio sprawą jaka nam została to sprawdzenie czy silniki się uzbrajają Jak uzbroić silniki ? - prosto, wystarczy dzwignię gazu dać maksymalnie w dół i maksymalnie w prawo, i tak trzymać przez ok 5 sekund (Nie trzymać dłużej ponieważ po 15 sekundach takiego trzymania APM przejdzie w tryb autotrymowania). Jeżeli wszytsko zaświeci się na zielono, to dron jest wstępnie gotowy do lotu. Tutaj w moim przypadku uzbrojenie nie udało sie, z bardzo prostej przyczyny, dalej nie podłączyłem kanału 3 w APM i po prostu APM nie wykrywa przesunięcia dzwigni gazu Tutaj jeszcze nie będe kończył. Wspominałem wcześniej o trybie RTL czyli powrót w miejsce startu. W ty momencie sprawa nie jest taka prosta, bo musimy sobie ustawić kilka ważnych parametrów. Żebyście omineli te problemy postaram sie wam wszystko opisać. Mój dron po wzniesieniu się i uruchomieniu funkcji RTL cofa się w miejsce startu i powoli zaczyna lądowanie. Możemy zrobić to na kilka sposobów, między innymi możemy zrobić tak aby dron wycował sie na miejsce startu, ale na określonej wysokości. Możemy to zrobić za pomoca parametru: RTL_ALT - Tutaj ustawiamy wysokość, na jaką ma wzbić się model po wywołaniu funkcji RTL. Ja wysokość mam ustawioną na 0 więc dron wraca na miejsce z taką wysokością jaką ma aktualnie. Kiedy dron będzie już schodził na ziemie możemy mu również wydać komendę aby przed ziemią zatrzymał sie na chwile. Służy do tego parametr: RTL_ALT_FINAL - Parametr ten daje nam możliwość ustawienia w cm, na jakiej wysokości dron ma zawisnąć i tą wysokość będzie utrzymywać. Oczywistym jest faktem, że ustawienie tego parametru na 0 spowoduje całkowite wylądowanie na ziemie Możemy również ustawić szybkość opadania drona w trybie RTL. Robimy to za pomocą parametru: RTL_SPEED - Wyrażony w cm/s,prędkość opadania,możemy ustawić parametr na 0 wieć APM wtedy przyjmie wartość domyślą Geofencing Nie bezpotrzeby wspominam o geofencingu. Geofence to takie troche zabepieczenie naszego modelu przed ucieczką. Na samym początku należy ustawić jak najmniejszą wartość. Czyli tak, ustawiamy wysokość i szerokość, po przekroczeniu tych punktów dron albo wykona komendę RTL albo Land czyli wyląduje.GeoFencing znajdziemy w zakładce “Config Tuning” - “GeoFence”. Oczywiście wszytskie parametry możemy ustawić tak jak to jest widoczne na załączonym obrazku. Ale ja i tak wytłumacze wam co i jak. Oczywiście musimy zaznaczyć “Enable”. Pierwsza pozycja to “Type”. Wybieramy z rozsówanej listy, typ naszej geo bariery. I tak: - None - Altitude - Circle - Altitiude and Circle itp Altitiude to z angielskiego wysokość, natomiast Circle to okręg. Wiec w tym przypadku najkożystnieszym dla nas będzie opcja Wysokości i okręgu (Altitude and Circle). Czyli maksymalna wysokość to 50 metrów a okręg ma 30 metrów. Po przekroczeniu tej bariery dron wraca w miejsce startu albo ląduje