DIY DRONES



Schematy połaczeń ESC do APM
Mała galeria, która obrazkowo pokazuje jak prawidłowo podłaczyć regulatory ESC do szyny Outputs. Na stronie “Budowa Drona”
dodałem schemat jedynie Quadcoptera z prostej przyczyny, sam składałem Quada więc wiem co i jak, a druga sprawa to to, że po
prostu wszytskie schematy nie zmieściły by sie na jednej stronie. Ale dobra,tyle słowem wstępu a teraz przechodzimy do samych
schematów:
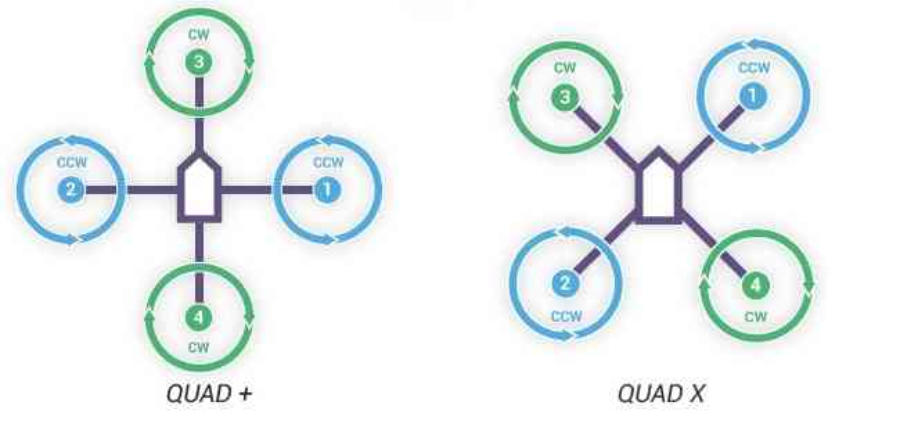
Pierwszy schemat to oczywiście Quad w układzie “Plus” i w układzie “X”.

Drugi schemat to połączenia troche bardziej skomplikowane. Przestawiają 3 rodzaje:
- Heksacopter
- Octacopter
- Tricopter Y6 (Nowa bardziej złożona rama)
I tak po kolei, heksacopter to dron mają na swoim pokładzie 6 silników i 6 ESC. Bardzo popularny schemat ponieważ przy takiej ilości
silników model jest bardziej stabilniejszy. Drugi schemat to Octacopter. Jak sama nazwa wskazuje posiada na pokładzie aż 8 silników
i 8 regulatorów ESC. W takim połączeniu model jest jeszcze bardziej stabilniejszy niż w Heksacopterze ale niestety również koszt
budowy takiego modelu jest znacznie wyższy niż heksa albo Quad. Ostatni model to tricopter Y6. W tym schemacie nie jestem
za bardzo obyty, ale jak widać na złaczonym obrazku, tricopter w układzie Y6 składa się z 6 silników i 6 ESC. Jednakże tutaj z małą
różnicą od heksa,na każdym z ramion silniki są od spodu i z góry, gdzie dolny kręci się w przeciwną strone niż górny.
Teraz chyba najbardziej złożona rama:
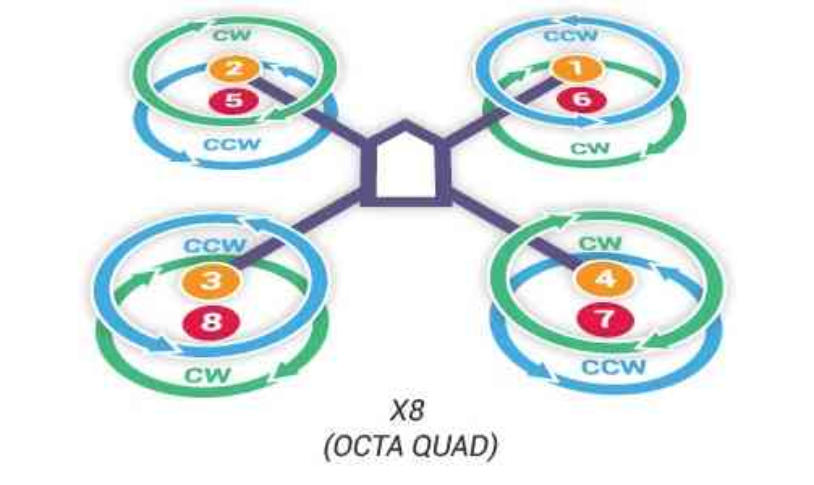
Rama w układzie X8. Wyglądem przypomina Quadcoptera jednak i tutaj silniki są po przeciwnej stronie, czyli od dołu i od góry.
Tak jak w Y6 jeden silnik kręci się w przeciwną stronę niż drugi.
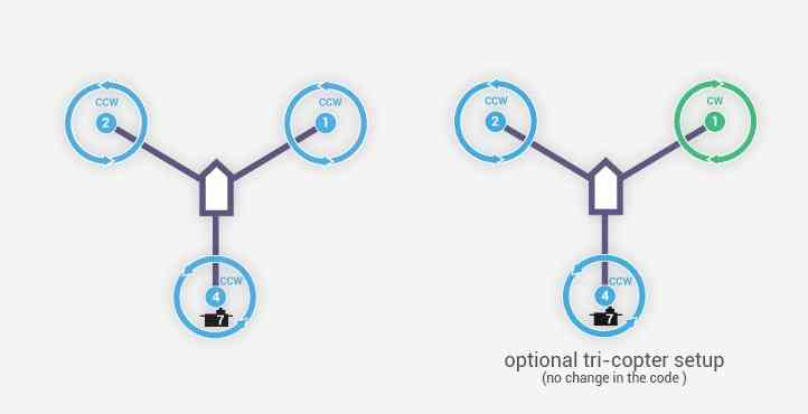
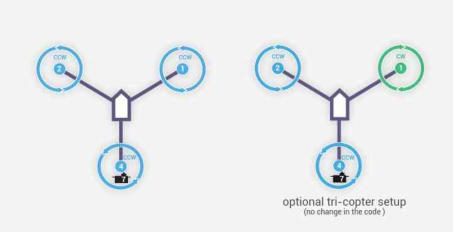
I teraz już ostatni na dzisiaj schemat czyli zwykły tricopter czyli chyba najtańsza wersja a za razem mało stabilna:
No i narazie jeżeli chodzi o schematy to powinno być wszytsko, chyba że jeszcze coś dojdzie (Myśle że chyba tak) to oczywiście
nowy schemat dodam do tej listy












DIY DRONES



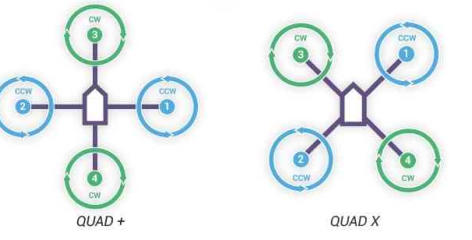
Pierwszy schemat to oczywiście Quad w układzie “Plus” i w układzie “X”.

Drugi schemat to połączenia troche bardziej skomplikowane.
Przestawiają 3 rodzaje:
- Heksacopter
- Octacopter
- Tricopter Y6 (Nowa bardziej złożona rama)
I tak po kolei, heksacopter to dron mają na swoim pokładzie 6 silników i
6 ESC. Bardzo popularny schemat ponieważ przy takiej ilości
silników model jest bardziej stabilniejszy. Drugi schemat to Octacopter.
Jak sama nazwa wskazuje posiada na pokładzie aż 8 silników
i 8 regulatorów ESC. W takim połączeniu model jest jeszcze bardziej
stabilniejszy niż w Heksacopterze ale niestety również koszt
budowy takiego modelu jest znacznie wyższy niż heksa albo Quad.
Ostatni model to tricopter Y6. W tym schemacie nie jestem
za bardzo obyty, ale jak widać na złaczonym obrazku, tricopter w
układzie Y6 składa się z 6 silników i 6 ESC. Jednakże tutaj z małą
różnicą od heksa,na każdym z ramion silniki są od spodu i z góry, gdzie
dolny kręci się w przeciwną strone niż górny.Teraz chyba najbardziej
złożona rama:
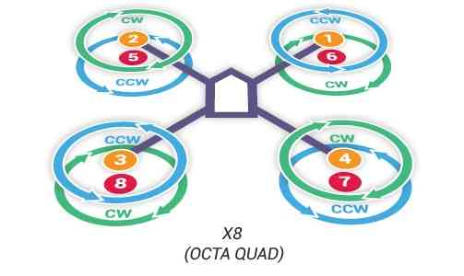
Rama w układzie X8. Wyglądem przypomina Quadcoptera jednak i tutaj
silniki są po przeciwnej stronie, czyli od dołu i od góry.
Tak jak w Y6 jeden silnik kręci się w przeciwną stronę niż drugi.
I teraz już ostatni na dzisiaj schemat czyli zwykły tricopter czyli chyba
najtańsza wersja a za razem mało stabilna:
No i narazie jeżeli chodzi o schematy to powinno być wszytsko, chyba że
jeszcze coś dojdzie (Myśle że chyba tak) to oczywiście nowy schemat
dodam do tej listy
Schematy połaczeń ESC do APM
Mała galeria, która obrazkowo pokazuje jak prawidłowo podłaczyć
regulatory ESC do szyny Outputs. Na stronie “Budowa Drona” dodałem
schemat jedynie Quadcoptera z prostej przyczyny, sam składałem
Quada więc wiem co i jak, a druga sprawa to to, że po prostu wszytskie
schematy nie zmieściły by sie na jednej stronie. Ale dobra,tyle słowem
wstępu a teraz przechodzimy do samych schematów:

